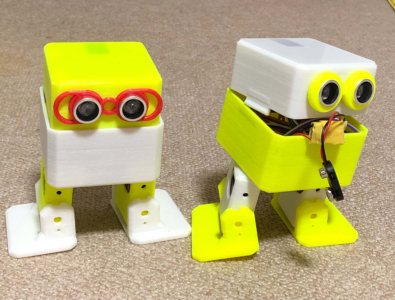
昨年秋頃から自身の周りで「OTTO DIY」なる2足歩行ロボットが急に盛り上がっていた。周りが盛り上がる中、ロボットに興味がなかった訳ではないが「まあ、また暇な時に見てみよう」って具合で静観していた。
OTTO DIY は完全にオープンソースの3D印刷可能なロボットであり、プロジェクトはクリエイティブ・コモンズ・ライセンス(CC-BY-SA)に準拠し、ThingverseやGithubでデザインファイルを公開してある。
ドキュメントは英語だが、イラストメインの組立マニュアルや、オンラインビデオが公開されており、組立自体は特殊な工具を必要とせず、ドライバーを使って約2時間程度で組み立てられる。
OTTO DIY は制御にArduinoを使用し「OttoBlockly」 なるブロックエディタや、Scratchベースの「Otto Scratch AI」を用いてプログラミングが可能となっている。モデルによって、2〜6個のサーボモーターを搭載し、前進、後退、右左折の動きができるほか、内蔵するセンサー類を使って動きをプログラミングすれば、障害物を検知し避けたり、メッセージを表示したり、音を鳴らしたり、片足立ちやユニークなダンスなど、かなり複雑な動きや踊りを踊ることができる。
カスタマイズが自由という事もあって個性豊かな派生機種が多く存在し、機構部品や電子部品の組立やカスタマイズから、プログラミングによるロボット制御まで物作り要素満載、条件を満たせば商業目的での販売も可能でありSTEM教育のツールとして展開するには打って付けの内容となっている。
そんな OTTO DIY なのだが、へそ曲がりな僕は、3Dプリンターで部品を出力し、2時間ほどで組み立てられる二足歩行ロボットに全く期待をしていなかった。
OTTO DIY の動きを見るまでは。。。。